G2 High Power 24v13 - одноканальный контроллер двигателя 40В/13А - Pololu 2992
Код: 1344888020
В наличии
от 586 ₴/мес
3 515 ₴
Доставка
 Нова Пошта
Нова Пошта
Оплата и гарантии
 Безопасная оплата картойБез переплат
Безопасная оплата картойБез переплат
Prom гарантирует безопасность
Вернем деньги при отказе от посылки Оплатить частямиБез переплат*, от 586 ₴/мес.
Оплатить частямиБез переплат*, от 586 ₴/мес.
 Наложенный платежНова Пошта
Наложенный платежНова Пошта







Характеристики и описание
| Количество каналов | 1 |
|---|---|
| Напряжение питания от | 6,5 В |
| Подавайте напряжение на | 40,0 В |
| Текущая эффективность | 1,0 А |
| Вес упаковки | 0,009 кг |
| Высота упаковки | 1 см |
| глубина упаковки | 10,5 см |
| Ширина упаковки | 8 см |
Описание товара: G2 High Power 24v13 - одноканальный контроллер двигателя 40В/13А - Pololu 2992
Модуль позволяет управлять одним двигателем постоянного тока. Двигатель может питаться от...от 6,5 В до 40 Впри непрерывном потреблении электроэнергии до13 АКратковременный (в течение 10 мс) ток до 100 А. Скорость можно регулировать с помощью ШИМ-сигнала, направление — с помощью цифрового вывода DIR, обеспечивая низкое (логический 0) или высокое (логический 1) состояние. Устройство также имеет датчик тока и возможность ограничения тока двигателя.
В комплект входят контроллер и разъемы для самопайки.
G2 High Power 24v13 - одноканальный контроллер двигателя 40V/13A - Pololu 2992.
Связь
Разъемы двигателя и питания расположены на одной стороне модуля. Управляющие контакты (логическая секция от 1,8 В до 5 В) расположены на другой стороне модуля. Источник питания двигателя способен выдавать высокий ток. К разъемам двигателя можно припаять позолоченные или винтовые клеммы (оба варианта входят в комплект).
Для обеспечения высокой производительности крайне важно подключить большой конденсатор между источником питания двигателя и землей как можно ближе к модулю. Рекомендуется использовать конденсатор емкостью не менее нескольких сотен мкФ. Необходимая емкость зависит от многих факторов, включая качество и расстояние до источника питания (более 30 см), параметры двигателя и частоту ШИМ-сигнала. Конденсатор можно подключить к отверстиям, обозначенным «+» и «-» (VM и GND соответственно). Контроллер имеет встроенный конденсатор емкостью 100 мкФ, достаточный для базовых приложений. Однако для большинства систем рекомендуется использовать конденсатор большей емкости.
Логическая часть модуля работает при напряжении от 1,8 В до 5 В (максимум 5,5 В). По умолчанию контроллер находится в спящем режиме. Для его пробуждения необходимо установить высокий уровень на выводе SLP. Для типичных применений требуются только два дополнительных вывода: PWM и DIR.
Выводы
| ПРИКОЛОТЬ | Описание |
|---|---|
VIN | Диапазон напряжения питания двигателя составляет от 6,5 В до 40 В, предусмотрена защита от обратного подключения. |
| VM | Этот вывод обеспечивает доступ к источнику питания двигателя после защиты от обратного подключения. Он может использоваться для подачи питания на другие компоненты при обратном подключении. Не следует использовать его с высокими токами. Вывод используется в качестве выхода. |
| + и - | Контакты для подключения конденсатора соединены с выводами VM и GND соответственно. |
| 3 на 3 | Стабилизированный выход 3,3 В, обеспечивающий несколько миллиампер для питания небольших компонентов. Не подключать к другим внешним линиям питания. Отключается, когда контроллер находится в спящем режиме. Будьте осторожны, чтобы не закоротить контакт V+, так как это может повредить плату. |
| НД | Масса системы. |
| OUTA | Выходной контакт двигателя (подключен к одной из клемм двигателя). |
| OUTB | Выходной контакт двигателя (подключен к другому клеммному разъему двигателя). |
| ШИМ | Входной ШИМ-сигнал для управления двигателем. По умолчанию низкий уровень. |
| ДИР | Контакт направления вращения двигателя. При низком уровне тока ток течет от OUTA к OUTB, при высоком — от OUTB к OUTA. По умолчанию — низкий уровень. |
| SLP | Контакт, переводящий контроллер в спящий режим. По умолчанию — низкий уровень (сон). |
| FLT | Индикатор ошибки. При обнаружении ошибки устанавливается в низкое состояние. Для использования необходимо подключить его к высокому уровню (логическому напряжению системы). |
| КС | Выходной сигнал чувствительности по току. Генерирует напряжение, пропорциональное току двигателя: 400 мВ/А + 50 мВ смещения. |
| VREF | Входное опорное напряжение. Для ограничения максимального выходного тока необходимо подключить резистор к земле. Без дополнительного резистора максимальный ток составляет 30 А. |
Таблица истинности
В таблице показана зависимость выходных сигналов от входных сигналов:
H - высокое состояние
L - низкий уровень
X - не имеет значения
ШИМ | ДИР | OUTA | OUTB | Состояние двигателя |
|---|---|---|---|---|
H | Х | H | L | Двигатель вращается по часовой стрелке со скоростью, составляющей % от скорости ШИМ. |
H | L | L | H | Двигатель вращается против часовой стрелки со скоростью, составляющей % от скорости ШИМ. |
L | X | L | L | Торможение. |
G2 High Power 24v13 - одноканальный контроллер двигателя 40V/13A - Pololu 2992.
Зависимость между значением сопротивления резистора в точке VREF и значением предельного тока.
Чувствительность измерения тока
Выход CS активен только тогда, когда H-мост находится в режиме управления. Он неактивен (низкий уровень), когда драйвер находится в режиме торможения, что происходит, когда ШИМ имеет низкий уровень или активировано ограничение тока. Ток будет продолжать циркулировать через двигатель, когда драйвер начнет торможение, но ток на выводе CS не будет отражать ток двигателя в режиме торможения. Напряжение CS используется драйвером внутри системы; во избежание помех не подключайте к этому выводу емкостную нагрузку (конденсатор) и не подключайте его к нагрузке, превышающей несколько миллиампер.
Модуль управления способен ограничивать ток двигателя путем импульсного регулирования. Когда ток достигает порогового значения, контроллер на короткое время переходит в режим торможения, после чего снова включает двигатель. Более практично использовать контроллер с двигателем, который потребляет несколько ампер во время работы, но значительно больше при запуске.
По умолчанию ограничение тока составляет 30 А. Его можно снизить, установив резистор между выводами VREF и GND. На графике ниже показана зависимость между значением резистора на выводе VREF и ограничением тока. Например, при резисторе 100 кОм между выводами VREF и GND ток уменьшается примерно до 16 А. При особенно низких значениях ограничение тока менее точное (пунктирная линия).
Условия обнаружения ошибок
Контроллер способен обнаруживать различные ошибки, сигнализируемые установкой вывода FLT в низкое состояние. Для его использования необходимо подключить его к высокому состоянию (логическое напряжение системы). Он может обнаруживать короткие замыкания на выходе, пониженное напряжение и перегрев. Все ошибки отключают выходы двигателя, но не блокируют их полностью, то есть контроллер попытается возобновить работу после устранения ошибки.
Контроллер способен выдерживать большие скачки тока в течение коротких периодов (100 А в течение нескольких миллисекунд). Он может выдерживать 13 А непрерывно, но это зависит от внешних условий, таких как температура окружающей среды и охлаждение двигателя. Для повышения производительности на плату можно установить радиатор.
Контроллер не имеет функции автоматического отключения в случае перегрева. Следует соблюдать осторожность, чтобы не повредить систему.
Краткое описание драйвера высокой мощности G2
| Имя | Напряжение источник питания | Текущий непрерывный |
|---|---|---|
| G2 High-Power 18v25 | 30 В | 25 А |
| G2 High-Power 18v17 | 30 В | 17 А |
| G2 High-Power 24v21 | 40 В | 21 А |
| G2 Мощный 24 В 13 В | 40 В | 13 А |
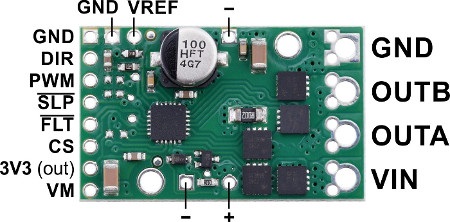
Описание контактов контроллера.
Спецификация
- Количество каналов: 1
- Напряжение питания: от 6,5 В до 40 В
- Рабочее напряжение логической части: от 1,8 В до 5 В.
- Постоянный ток на канал: 13 А
- Максимальный мгновенный ток на канал (до 10 мс): 100 А
- Частота ШИМ: до 100 кГц
- Чувствительность датчика тока: 0,04 В/А
- Безопасность:
- против обратного подключения напряжения питания
- против слишком низкого напряжения питания
- перед коротким замыканием
- Размеры: 33 x 20 мм
- Вес: 3,3 г (без разъемов)
- В комплект входят мод, разъемы с золотыми штырями и винтовые разъемы.












