Tic T249 - USB 47V / 4.5A драйвер шагового двигателя - собранный - Pololu 3138
Код: 128673269В наличии
от 620 ₴/мес
3 723 ₴
Доставка
 Нова Пошта
Нова Пошта
Оплата и гарантии
 Безопасная оплата картойБез переплат
Безопасная оплата картойБез переплат
Prom гарантирует безопасность
Вернем деньги при отказе от посылки Оплатить частямиБез переплат*, от 620 ₴/мес.
Оплатить частямиБез переплат*, от 620 ₴/мес.
 Наложенный платежНова Пошта
Наложенный платежНова Пошта Оплата на счетIBAN UA473220010000026003340045448
Оплата на счетIBAN UA473220010000026003340045448






Характеристики и описание
| Производитель | Arduino |
|---|
Описание продукта: Tic T249 - USB-драйвер шагового двигателя 47 В / 4,5 А - собранный - Pololu 3138
Система позволяет управлять шаговым двигателем с помощью устройства, позволяющего генерировать логические состояния, такие как: Например, Arduino, STM32Discovery, Raspberry Pi или любой микроконтроллер. Драйвер можно настраивать, тестировать и контролировать через USB, он работает в Windows, Linux и macOS.
Модуль Pololu очень прост в использовании. Чтобы повернуть двигатель на один шаг, введите высокий уровень на пин STEP (логическая единица), другая последовательность нулей и единиц перемещает двигатель на один шаг, и так далее. Такт, высокое состояние - наоборот). Управление также имеет возможность выбора разрешения работы двигателя.
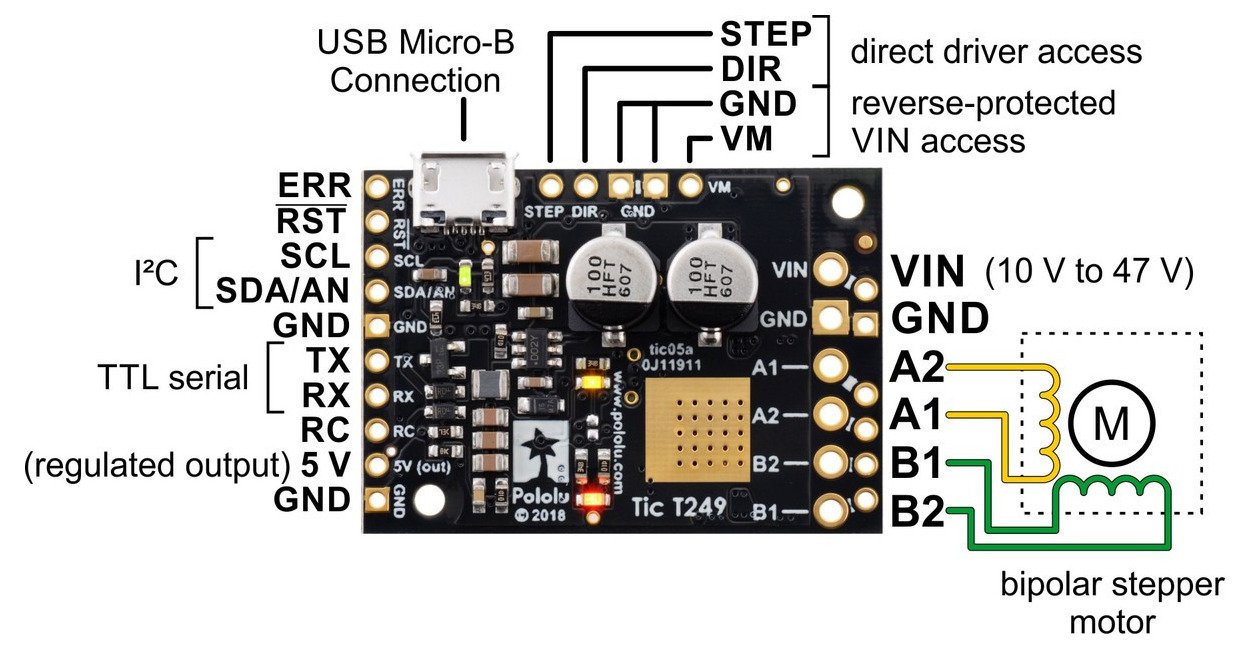
На рисунке показано минимальное подключение контроллера.
Подключение блока управления
Для управления биполярным шаговым двигателем подключите систему, как показано на следующем рисунке. Если номинальное напряжение двигателя меньше требуемого питания контроллера (10 В), ограничение тока должно быть установлено вручную с помощью потенциометра.
Производитель предоставляет исчерпывающую инструкцию по эксплуатации.
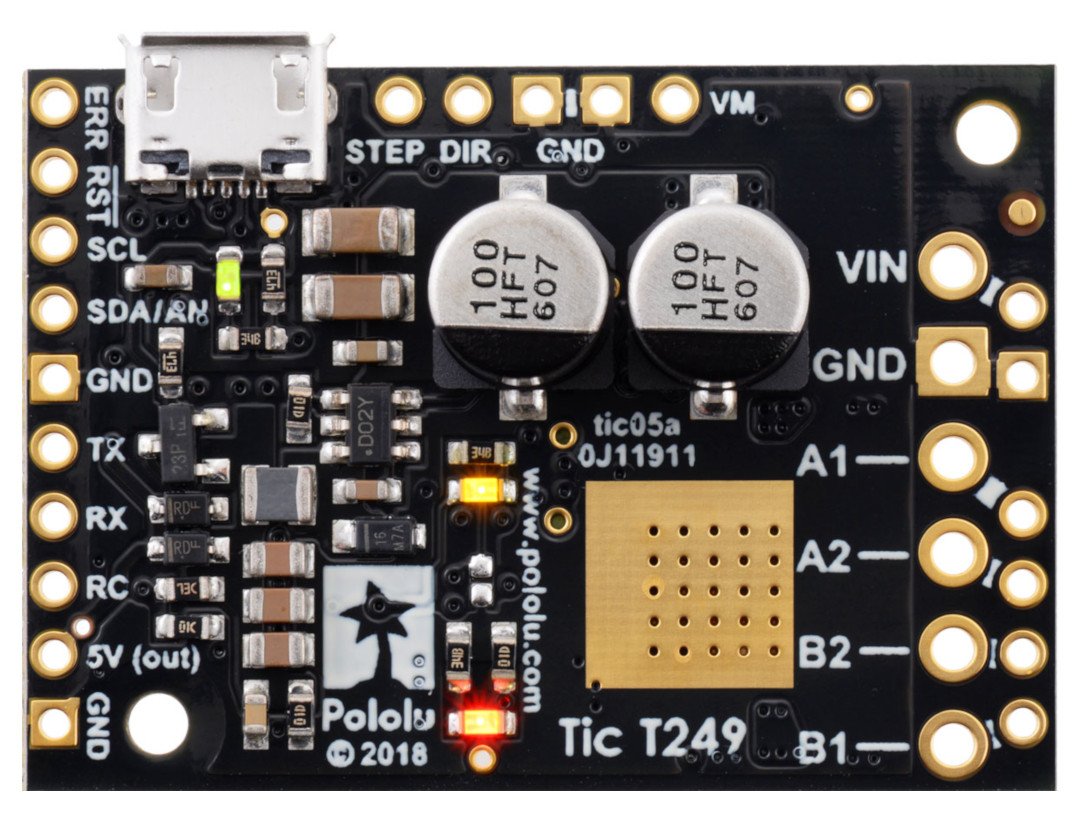
Светодиодные диоды
На плате есть три светодиода: зеленый, красный, желтый. Зеленый означает связь через USB. Красный подключен к контакту ERR, если он загорается, это означает ошибку. Желтый указывает на состояние шагового двигателя и дает информацию о возможных ошибках. Подробное описание см. в документации на сайте производителя.
Рассеивание теплаПечатная плата рассчитана на отвод тепла при потребляемом токе около 1,8 А на катушку. Если ток намного выше, необходимо использовать внешний теплоотвод, для крепления которого можно использовать теплопроводящий клей.
Предупреждение.
Подключение и отключение двигателя при включенном блоке управления может повредить систему.
Технические характеристики Tic T249 - Драйвер шагового двигателя USB 47 В / 4,5 А - собранный - Pololu 3138
- Напряжение питания двигателя: 10 В - 47 В
- Ток: макс. 1,8 А на катушку (с охлаждением до 4,5 А)
- Напряжение питания логической части: Контроллер 5 В – внешний источник питания не требуется.
- Простой интерфейс управления
- Работайте в 6 различных режимах: полный шаг, 1/2, 1/4, 1/8, 1/16 и 1/32 шага.
- Возможность регулировать ток, потребляемый двигателем, с помощью потенциометра
- Защита от чрезмерного тока двигателя
- Автотоварыматическое переключение между режимами в зависимости от тока, потребляемого двигателем
- Защита от перегрева системы
- Он имеет 6 интерфейсов управления: USB, последовательный TTL, I2C, RC-импульсный сервопривод, аналоговый квадратный энкодер.
- Максимальная скорость шага: 50 000 шагов в секунду
Вопросы и ответы
0
Хочешь узнать больше о товаре? Спрашивай — продавец с радостью подскажет.







